
Όπως μια μέλισσα που μετακινείται από λουλούδι σε λουλούδι, το νέο ιπτάμενο ρομπότ, του οποίου το πλάτος δεν ξεπερνά το ένα εκατοστό, μπορεί να αιωρείται, να αλλάζει κατεύθυνση και να χτυπά μικρούς στόχους.
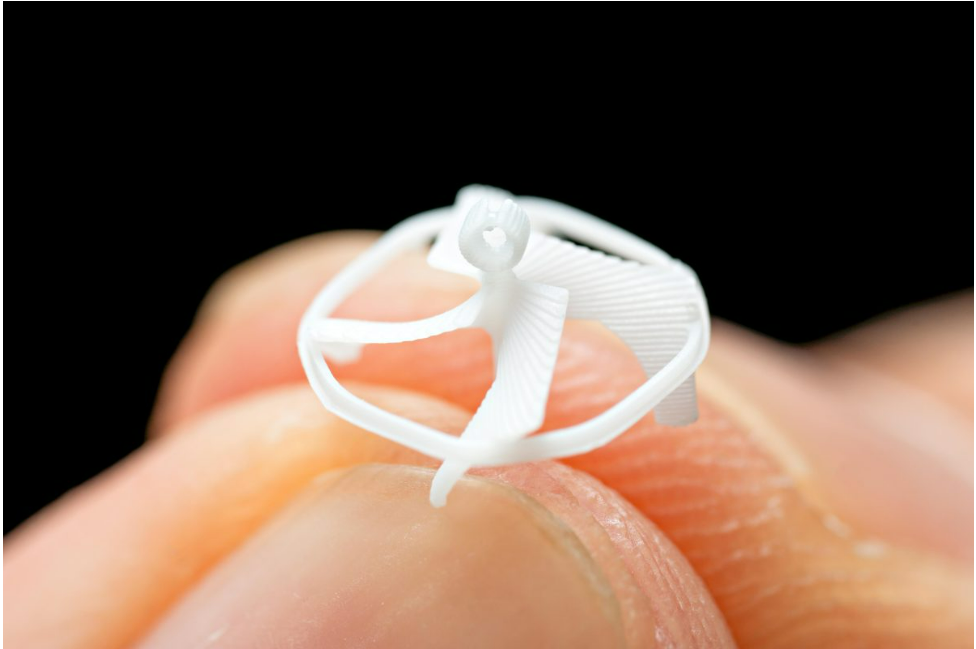
Το ρομπότ, που αναπτύχθηκε από μηχανικούς στο Πανεπιστήμιο της Καλιφόρνια, Μπέρκλεϊ, ζυγίζει μόλις 21 χιλιοστόγραμμα και αποτελεί το μικρότερο ασύρματο ρομπότ στον κόσμο που μπορεί να πετάει υπό έλεγχο.
«Οι μέλισσες εμφανίζουν εξαιρετικές αεροναυτικές ικανότητες, όπως πλοήγηση, αιώρηση και επικονίαση, ικανότητες που τα τεχνητά ιπτάμενα ρομπότ παρόμοιας κλίμακας δεν καταφέρνουν να πετύχουν», είπε ο Liwei Lin, Διακεκριμένος Καθηγητής Μηχανολογίας στο UC Berkeley. «Αυτό το ιπτάμενο ρομπότ μπορεί να ελεγχθεί ασύρματα για να πλησιάσει και να χτυπήσει έναν καθορισμένο στόχο, μιμούμενο τον μηχανισμό επικονίασης καθώς μια μέλισσα συλλέγει νέκταρ και πετά μακριά».
Ο Lin είναι ο ανώτερος συγγραφέας μιας νέας εργασίας για το ρομπότ, η οποία δημοσιεύθηκε στις 28 Μαρτίου στο περιοδικό Science Advances.
Μαγνητική πρόωση τροφοδοτεί την πτήση του μικρού ρομπότ
Για να πετύχει την πτήση, ένα ρομπότ χρειάζεται συνήθως μια πηγή ενέργειας, όπως μια μπαταρία και ηλεκτρονικά για να ελέγχει τις κινήσεις του.
Ωστόσο, η ένταξη αυτών των συστατικών σε μια μικροσκοπική, ελαφριά συσκευή είναι μια μεγάλη πρόκληση. Για να λύσουν αυτό το πρόβλημα, ο Lin και η ομάδα του UC Berkeley χρησιμοποίησαν ένα εξωτερικό μαγνητικό πεδίο για να τροφοδοτούν το ρομπότ και να καθοδηγούν την πορεία της πτήσης του.
Το ρομπότ έχει σχήμα μικρής προπέλας και περιλαμβάνει δύο μαγνήτες. Υπό την επίδραση ενός εξωτερικού μαγνητικού πεδίου, οι μαγνήτες αυτοί προσελκύονται και απωθούνται, κάνοντάς την προπέλα να περιστρέφεται και παράγοντας αρκετή άνωση για να σηκώσει το ρομπότ από το έδαφος. Η πορεία της πτήσης του ρομπότ μπορεί να ελεγχθεί ακριβώς μεταβάλλοντας τη δύναμη του μαγνητικού πεδίου.
Το επόμενο μεγαλύτερο ρομπότ με παρόμοιες ικανότητες πτήσης έχει διάμετρο 2,8 εκατοστά, σχεδόν τρεις φορές μεγαλύτερο από το νέο ιπτάμενο ρομπότ.
Μικρή κλίμακα, μεγάλες δυνατότητες
«Τα μικροσκοπικά ιπτάμενα ρομπότ είναι χρήσιμα για την εξερεύνηση μικρών κοιλοτήτων και άλλων περίπλοκων περιβαλλόντων», δήλωσε ο συν-πρώτος συγγραφέας της μελέτης Fanping Sui, ο οποίος πρόσφατα ολοκλήρωσε το διδακτορικό του στην μηχανική στο UC Berkeley.
«Αυτό θα μπορούσε να χρησιμοποιηθεί για τεχνητή επικονίαση ή για την επιθεώρηση μικρών χώρων, όπως το εσωτερικό ενός σωλήνα».
Αυτήν τη στιγμή, το ρομπότ είναι ικανό μόνο για παθητική πτήση. Αυτό σημαίνει ότι, σε αντίθεση με τα αεροπλάνα ή πιο προηγμένα drones, δεν διαθέτει αισθητήρες για να ανιχνεύει τη θέση ή την πορεία του και δεν μπορεί να προσαρμόσει τις κινήσεις του σε πραγματικό χρόνο.
Έτσι, ενώ το ρομπότ είναι ικανό για ακριβείς πορείες πτήσης, μια ξαφνική αλλαγή στο περιβάλλον, όπως ένας δυνατός άνεμος, θα μπορούσε να το αποδιοργανώσει.
Προς πιο έξυπνα ρομπότ
Η λειτουργία του ρομπότ απαιτεί επίσης ένα ισχυρό μαγνητικό πεδίο που παρέχεται από ηλεκτρομαγνητικό πηνίο. Ωστόσο, η περαιτέρω μινιμαλιστικοποίηση του ρομπότ σε μέγεθος μικρότερο από 1 χιλιοστό, περίπου το μέγεθος μιας μύγας, θα μπορούσε να το καταστήσει αρκετά ελαφρύ για να ελεγχθεί από πιο αδύναμα μαγνητικά πεδία, όπως αυτά που παράγονται από ραδιοκύματα.
Εκτός από το νέο ρομπότ εμπνευσμένο από τις μέλισσες, η ομάδα του Lin έχει δημιουργήσει επίσης ένα ρομπότ εμπνευσμένο από την κατσαρίδα που μπορεί να τρέχει στο έδαφος και να επιβιώνει από το να το πατήσει άνθρωπος.
Ο Yue εργάζεται επίσης σε νέα «συναθροισμένα» ρομπότ που μπορούν να συνεργάζονται όπως οι μέλισσες για να επιτύχουν καθήκοντα που θα ήταν αδύνατο για μεμονωμένα ρομπότ.
«Δουλεύω με ρομπότ κλίμακας 5 χιλιοστών που μπορούν να σέρνονται, να κυλούν και να περιστρέφονται και μπορούν επίσης να συνεργάζονται για να σχηματίσουν αλυσίδες και διατάξεις ή να εκτελέσουν ακόμη πιο δύσκολες εργασίες», είπε ο Yue.
«Θα μπορούσαν να χρησιμοποιηθούν σε ελάχιστα επεμβατική χειρουργική, καθώς θα μπορούσαμε να τα εισάγουμε στο σώμα και να συνεργαστούν για να σχηματίσουν στεντ, να μειώσουν το θρόισμα ή να εκτελέσουν άλλες εργασίες».
VIA: FoxReport.gr

